
L’idée de base de la conception de ce bassin d’accouchement automatisé, est de le subdiviser en différents sous-projets indépendants qui, une fois terminés, s’intègreraient dans l’ensemble final.
Sous-projet 1: concevoir un système d’avance et de rotation du bébé.
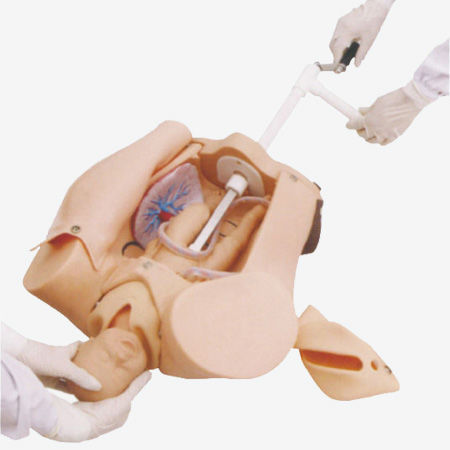
L’avance du bébé débute à la fin du travail de la maman, lorsque le col de l’utérus est ouvert au maximum (entre 10 et 12 cm de diamètre). Un vérin, équipé d’un préhenseur adapté à la poupée qui simule le bébé, poussera le bébé de façon axiale. La forme du préhenseur sera étudiée pour que la poupée soit fixée par la tête (accouchement en siège) ou par les jambes (accouchement classique). La course, de maximum 30cm, sera régulée en position et suivra le rythme imposé par les contractions de la maman (voir sous-projet 4). La précision axiale souhaitée est de l’ordre du cm et n’exigera pas une régulation très sophistiquée. En parallèle avec ce mouvement axial, un deuxième moteur réalisera une rotation régulée (de 0° à 180° ou de 0° à -180° avec une précision de 2 à 3°) de la poupée. Ici aussi la régulation sera simple.
Sous-projet 2: concevoir un système automatisé de l’ouverture du col de l’utérus
Une armature métallique recouverte d’un revêtement imitant au mieux la texture réelle de l’utérus (du latex par exemple) sera pilotée (voir sous-projet 5) de sorte que l’enseignante pourra décider du diamètre de l’ouverture du col. Les diamètres d’ouverture seront limités à 12 paliers espacés d’1 cm (de 0 à 12 cm). L’apprenant devra réaliser le toucher vaginal et évaluer ce diamètre. Ces gestes techniques sont réalisés uniquement pendant le travail de la maman. Lorsque l’ouverture est maximale, nous passons au sous-projet 1 avec l’avance axiale et la rotation.
Sous-projet 3: concevoir un système de simulation des contractions et de la position du bébé
La forme du ventre de la maman est réalisée dans une matière dure et rigide (de la fibre de verre devrait être suffisante). Au-dessus de cette coque, un système pneumatique alvéolaire sera placé. L’enseignant pourra décider de la (des) zones à gonfler pour simuler la position du dos, de la tête, … du bébé. La position du bébé devra être examinée par l’apprenant via les manœuvres de Léopold. Ces gestes techniques sont généralement faits pendant la phase de travail.
Au-dessus de cette couche alvéolaire seront placés un revêtement souple pouvant suivre les formes gonflées (une fine cote de mailles métalliques par exemple), un ballon réglable en pression sur toute la surface de la coque et, finalement, un revêtement souple dont la couleur et la texture imitent la peau du ventre de la maman. Lorsque le ballon sera gonflé, la peau ne sera pas en contact avec la cote de mailles et le toucher sera ‘souple’. Lorsque le ballon sera dégonflé, la peau en contact avec la cote de mailles sera plus rigide et correspondra à une contraction de la maman. Les contractions sont observées par la sage-femme durant le travail et, lorsque la maman est sous péridurale, également durant l’accouchement.
Sous-projet 4: concevoir un système de supervision
Pour visualiser les courbes correspondant aux contractions et aux paramètres vitaux de la maman (et du bébé), un écran sera placé à côté de la maman et correspondra au monitoring que la sage-femme observe fréquemment. L’apprenant disposera d’un deuxième écran qui lui permettra d’envoyer ses consignes (diamètre d’ouverture du col, choix des courbes affichées, vitesse de défilement de la courbe, démarrage de l’accouchement, arrêt de la simulation, …) et de décider de la difficulté de l’accouchement (accouchement normal, accouchement en siège, problème de procidence du cordon, …). Les courbes seront programmées dans un ‘langage open source’ soit au départ de courbes réelles enregistrées en milieu hospitalier, soit au départ d’un profil de base sur lequel l’enseignant choisira des points directeurs de l’évolution globale. Le format de la programmation permettra l’affichage ‘monitoring’ et la lecture par l’automate programmable (voir sous-projet 5).
Sous-projet 5: gestion globale du bassin d’accouchement automatisé
Les consignes, les lectures des capteurs, la gestion de la supervision, … passeront par un automate programmable. Voici quelques fonctions qui seront implémentées dans ce dernier:
Ouverture du col de l’utérus en fonction de la consigne de l’apprenant (sous-projet 2)
Avance et rotation du bébé en fonction de la lecture de la courbe de contraction (sous-projet 1)
Pilotage des valves et de la pression de gonflage des alvéoles et du ballon (sous-projet 3) pour simuler la position du bébé (en fonction des consignes de l’apprenant) et les contractions (en fonction de la lecture de la courbe des contractions)
- Courbes de simulation – Voir cours hôpital virtuel Ste Julienne
- Matériel de base non automatisé
- Décrire les différentes étapes – décrire l’oignon
- Programmation – format dans l’automate programmable et format disponible du monito – programmation en C open source
- Partie mécanique : choix du matériel électrique pour la partie vérin, développement du cylindre et dessin du guide dans le cylindre, partie ventre (pneumatique) pour simulation de contractions
- Partie mode : tête du bébé + ouverture du col : type de matériau + test de résistance + compatibilité avec partie mécanique (traction, accroche, etc.)